




車企與IT企業(yè)都在秀各自的手勢(shì)控制,這些酷炫的技術(shù)背后,離不開的是測(cè)距設(shè)備、芯片和算法。
觸摸控制方式正在逐漸取代汽車中控屏上的物理按鍵。但是,我們也都知道,觸控并非是唯一被選擇的交互方式。語(yǔ)音、手勢(shì)甚至包括眼球、意念控制都曾出現(xiàn)在各式各樣的概念車上。今兒的主角就是手勢(shì)控制技術(shù)。
比如說(shuō)今年召開的CES Asia電子展上,大眾就展出了一輛帶有手勢(shì)控制功能的Golf R Touch。當(dāng)然,大眾并不是唯一的參與者。同樣是在這屆CES上,英特爾展出了3D實(shí)感技術(shù),不僅可以捕捉手部動(dòng)作,還能夠?qū)崿F(xiàn)面部識(shí)別、3D掃描建模等。而在隨后的谷歌2015年I/O開發(fā)者大會(huì)上,一款名為Project Soli的可穿戴智能設(shè)備芯片也能夠?qū)崟r(shí)檢測(cè)雙手和手指上的微小活動(dòng),并根據(jù)設(shè)定執(zhí)行相應(yīng)動(dòng)作。這些看上去就酷炫無(wú)比讓人手癢癢的技術(shù),是怎么做到的吶?

手勢(shì)控制,天下三分
雖然三家公司都是手勢(shì)識(shí)別技術(shù),但是他們?nèi)齻€(gè)所采用的具體技術(shù)卻不盡相同。據(jù)透露,大眾的Golf R Touch上采用的是ToF技術(shù),英特爾的是結(jié)構(gòu)光技術(shù),而谷歌則使用了毫米波雷達(dá)的技術(shù)。下面就分別來(lái)說(shuō)道說(shuō)道。
ToF的全稱為飛行時(shí)間(Time of Flight),是一種通過(guò)計(jì)算光線的傳播時(shí)間來(lái)測(cè)量距離的技術(shù)。根據(jù)距離的不同來(lái)判斷出不同手指的具體位置,從而判斷出具體的手勢(shì),再對(duì)應(yīng)到相應(yīng)的控制命令之上。
要通過(guò)光線傳播來(lái)測(cè)算距離,那么就需要一個(gè)能夠發(fā)射光線的裝置和接收光線的感應(yīng)裝置。大眾使用了一個(gè)3D相機(jī)模塊來(lái)發(fā)射脈沖光,再利用內(nèi)置的感應(yīng)器接收用戶手部反射回的光線。然后,根據(jù)二者的時(shí)間差,處理芯片就可以構(gòu)建出手部目前的位置和姿勢(shì)。
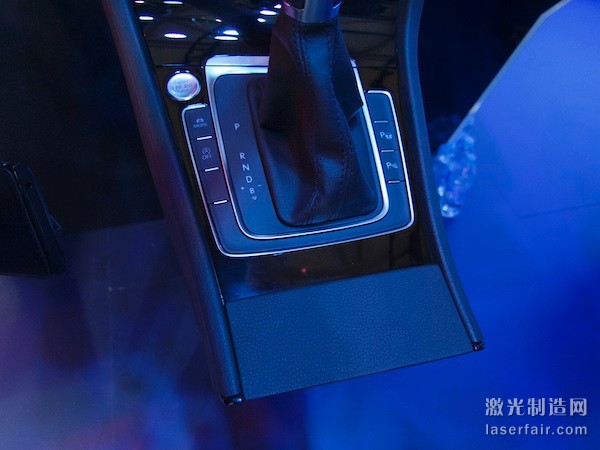
大眾手勢(shì)識(shí)別技術(shù)中藏在換擋桿后方的ToF攝像頭(紅點(diǎn)位置)
通過(guò)實(shí)時(shí)采集這些信息,中控系統(tǒng)就可以調(diào)用相應(yīng)的數(shù)據(jù)庫(kù)獲得用戶正在進(jìn)行的動(dòng)作。再根據(jù)預(yù)先定義的功能,就可以實(shí)現(xiàn)不同的操作。由于光的傳播速度非常快,基于ToF技術(shù)的感光芯片需要飛秒級(jí)的快門來(lái)測(cè)量光飛行時(shí)間。這也是ToF技術(shù)難以普及的原因之一,這樣的感光芯片成本過(guò)高。
結(jié)構(gòu)光技術(shù)基本原理與ToF技術(shù)類似,所不同之處在于其采用的是具有點(diǎn)、線或者面等模式圖案的光。以英特爾公司的集成式前置實(shí)感攝像頭為例,其包括了紅外激光發(fā)射器、紅外傳感器、色彩傳感器以及實(shí)感圖像處理芯片。

英特爾實(shí)感技術(shù)所用攝像頭
其基本原理為:首先激光發(fā)射器將結(jié)構(gòu)光投射至前方的人體表面,再使用紅外傳感器接收人體反射的結(jié)構(gòu)光圖案。然后,處理芯片根據(jù)接收?qǐng)D案在攝像機(jī)上的位置和形變程度來(lái)計(jì)算物體人體的空間信息。結(jié)合三角測(cè)距原理,再進(jìn)行深度計(jì)算,即可進(jìn)行三維物體的識(shí)別。攝像頭把采集到的信息發(fā)送到負(fù)責(zé)實(shí)感計(jì)算的軟件開發(fā)包(Software Development Kit,SDK)后,該SDK結(jié)合加速度計(jì)算器,就可以提供手勢(shì)識(shí)別等功能。
作為一種快速、便攜、高精度的三維測(cè)量技術(shù),結(jié)構(gòu)光測(cè)量技術(shù)在航空、模具、醫(yī)療等領(lǐng)域均得到了廣泛的應(yīng)用。手勢(shì)識(shí)別只是其中的一個(gè)應(yīng)用案例。
毫米波雷達(dá)的原理同樣與ToF技術(shù)基本相同,只不過(guò)用于測(cè)量的介質(zhì)從光線變成了無(wú)線電波。Project Soli利用內(nèi)置的毫米波發(fā)生器把無(wú)線電波(雷達(dá)波)發(fā)射出去,然后利用接收器接收回波。這時(shí),內(nèi)置的處理芯片會(huì)根據(jù)收發(fā)之間的時(shí)間差實(shí)時(shí)計(jì)算目標(biāo)的位置數(shù)據(jù)。
通過(guò)比較不同時(shí)間段手指位置的不同,Project Soli就可以與內(nèi)置的數(shù)據(jù)比較,得到手指正在進(jìn)行的動(dòng)作。毫米波雷達(dá)的缺點(diǎn)在于信號(hào)容易被空氣阻擋,掃描范圍有限,因而對(duì)遠(yuǎn)距離目標(biāo)探測(cè)不清楚,但對(duì)近距離目標(biāo)勘測(cè)十分清晰。在主動(dòng)安全技術(shù)中,毫米波雷達(dá)的身影已經(jīng)不可或缺。另外,在近程高分辨力防空系統(tǒng)、導(dǎo)彈制導(dǎo)系統(tǒng)、目標(biāo)測(cè)量系統(tǒng)等均有應(yīng)用。
車載路漫漫
大眾的手勢(shì)識(shí)別技術(shù)在體驗(yàn)過(guò)程中雖然反應(yīng)略慢,但是準(zhǔn)確率還不錯(cuò);英特爾的實(shí)感技術(shù)據(jù)稱已經(jīng)研發(fā)了三年之久,在游戲上也已經(jīng)開始實(shí)用;谷歌的Project Soli則還只是個(gè)展示,尚未正式應(yīng)用。但是不管是哪一個(gè),車載的路依然很長(zhǎng)。大眾的工程師表示至少還需要兩年的時(shí)間才能夠把手勢(shì)識(shí)別正式帶到量產(chǎn)車型之上,英特爾的實(shí)感技術(shù)還在與車企接洽,至于谷歌的,就更遠(yuǎn)了。
ToF技術(shù)在應(yīng)用時(shí)具有明顯的缺點(diǎn)——“外部疊加誤差”。所謂外部疊加誤差,是相對(duì)于由于光線散射導(dǎo)致的內(nèi)部疊加誤差而言的。誤差產(chǎn)生的原因在于相機(jī)發(fā)射的光線在到達(dá)手部時(shí)沒有直接返回相機(jī)的感光原件,而是通過(guò)幾次不規(guī)則漫反射才回到相機(jī)模塊。這樣測(cè)量出來(lái)的距離就與實(shí)際距離不匹配。然而,如果相機(jī)中的背景是固定的,感應(yīng)器就可以忽略外部疊加誤差引起的測(cè)量錯(cuò)誤。大眾Golf正是利用車廂這一固定的背景來(lái)減少誤差帶來(lái)的影響。
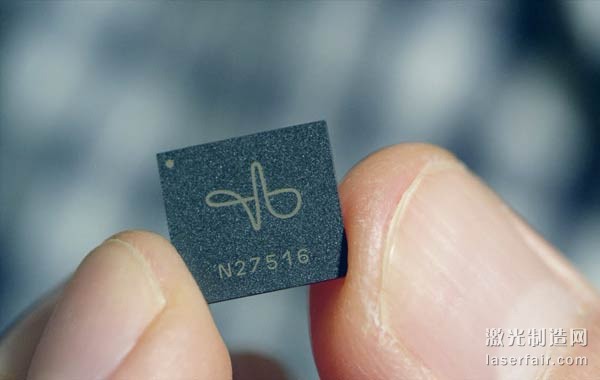
谷歌Project Soli芯片
Project Soil采用的是60GHz、波長(zhǎng)為5毫米的極高頻毫米波無(wú)線電波來(lái)捕捉動(dòng)作、距離、速度等信息,感應(yīng)誤差精細(xì)到毫米。然而,如何把具有如此精度的設(shè)備微小化是一件十分苦難的事情,最難的地方在于微小化會(huì)影響器件的發(fā)射功率和效率、感應(yīng)靈敏度等。谷歌用了十個(gè)月左右才將其從PC主機(jī)大小縮小到了硬幣大小,且為了提高精度與排除干擾,用到了兩個(gè)發(fā)射器與四個(gè)接收器。目前,Project Soli還沒有正式應(yīng)用到具體設(shè)備中。
至于英特爾的實(shí)感技術(shù),從技術(shù)本身來(lái)說(shuō),最需要解決的問題首先是需要驗(yàn)證是否適合用在車內(nèi)。另外,從現(xiàn)場(chǎng)體驗(yàn)來(lái)看,識(shí)別的準(zhǔn)確度還有待提升。
除了技術(shù)研發(fā)上的難題之外,用戶在使用時(shí)的體驗(yàn)也對(duì)開發(fā)者提出了挑戰(zhàn)。
與傳統(tǒng)操作方式的不同就要求開發(fā)團(tuán)隊(duì)設(shè)計(jì)一套新手教程,以此來(lái)讓用戶逐步體感技術(shù)的使用方法;用戶在使用過(guò)程中可能手的一部分會(huì)在探測(cè)區(qū)域之外;在實(shí)際的應(yīng)用中,系統(tǒng)也會(huì)需要根據(jù)環(huán)境進(jìn)行攝像頭的矯正,存在一個(gè)學(xué)習(xí)的過(guò)程。這些都是需要開發(fā)團(tuán)隊(duì)提前想好應(yīng)對(duì)策略。
轉(zhuǎn)載請(qǐng)注明出處。


 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀














 關(guān)注我們
關(guān)注我們